HP ProLiant 4500 Disk Subsystem Performance and Scalability - Page 17
Like Drive Scalability
 |
View all HP ProLiant 4500 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 17 highlights
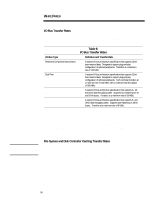
ECG025.0997 WHITE PAPER (cont.) ... Concurrency is very effective in a multi-drive environment because, while one drive is retrieving data, another request can be coming across the SCSI bus as shown in Figure 7. When using multiple drives, each drive can send data across the SCSI bus as soon as it is available. As more drives are added to the system, the busier the SCSI bus becomes. Eventually the SCSI bus becomes so busy that it yields no idle time. SCSI Bus Idle Drive 3 Legend Request for Data (SCSI Bus) Retrieving Data (Disk Drive) Sending Data (SCSI Bus) Idle Time (Disk Drive) Idle Time (SCSI Bus) 3 3 3 6 6 6 Drive 2 2 2 2 5 55 Drive 1 1 1 1 4 4 4 First I/O Request Time Figure 7: Concurrency taking place in a multiple drive configuration. In conclusion, without concurrency (shown in Figure 6) the SCSI bus remains idle 60% of the time. In contrast, when using concurrency (shown in Figure 7) the SCSI bus remains busy 100% of the time and the subsystem is able to transfer more I/O requests in a shorter period of time. In the next few sections, we apply the knowledge learned earlier in this document to analyze the test results for Like Drive, Like Capacity and Disk Controller Scaling. LIKE DRIVE SCALABILITY Hardware scalability is difficult to accomplish and to maintain. The right balance or mixture is crucial for an effective disk subsystem. It is important to remember to balance the current performance needs with future disk capacity and performance requirements. For this reason, you need to choose the best performance configuration for the current disk subsystems, and at the same time allow enough room in the configuration to fulfill 17
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
 12
12 -
 13
13 -
 14
14 -
 15
15 -
 16
16 -
 17
17 -
 18
18 -
 19
19 -
 20
20 -
 21
21 -
 22
22 -
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
 |
 |
