HP Superdome SX2000 ACSE/Presentation and ROSE Interface Programmer's Guide - Page 27
ROSE Calls and Primitives
 |
View all HP Superdome SX2000 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 27 highlights
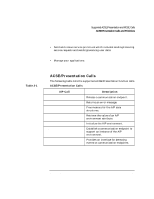
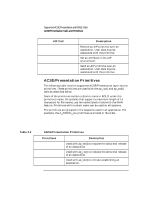
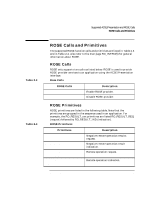
Supported ACSE/Presentation and ROSE Calls ROSE Calls and Primitives Table 2-3 Table 2-4 ROSE Calls and Primitives The supported ROSE function calls and primitives are listed in Table 2-3 and in Table 2-4. Also refer to the man page RO_INTRO(5) for general information about ROSE. ROSE Calls ROSE only supports two calls as listed below. ROSE is used to provide ROSE provider services to an application using the ACSE/Presentation interface. Rose Calls ROSE Calls Description ro_bind() ro_unbind() Enable ROSE provider. Disable ROSE provider. ROSE Primitives ROSE primitives are listed in the following table. Note that the primitives are grouped in the sequence used in an application. For example, the RO_RESULT_xxx primitives are listed RO_RESULT_REQ (request) followed by RO_RESULT_IND (indication). ROSE Primitives Primitives RO_ERROR_REQ RO_ERROR_IND RO_INVOKE_REQ RO_INVOKEREQ RO_INVOKE_IND RO_INVOKEIND Description Negative remote operation results request. Negative remote operation result indication. Remote operation request. Remote operation indication. Chapter 2 27
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
 22
22 -
 23
23 -
 24
24 -
 25
25 -
 26
26 -
 27
27 -
 28
28 -
 29
29 -
 30
30 -
 31
31 -
 32
32 -
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
 |
 |