Lowrance HDS-7 Carbon Operators Manual EN - Page 117
Ref. depth, Course mode, Contour Cross Angle CCA, Autopilot Controller
 |
View all Lowrance HDS-7 Carbon manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 117 highlights
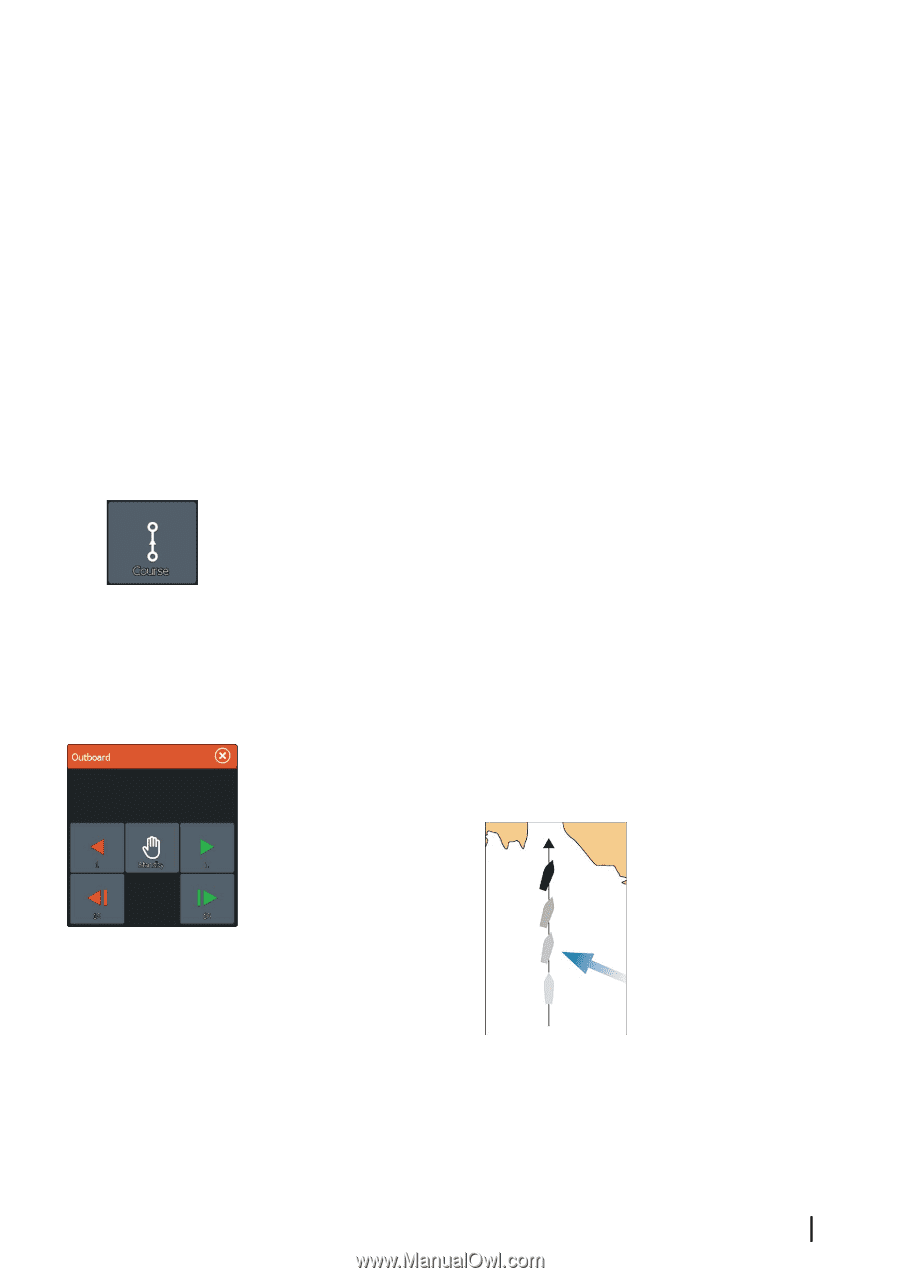
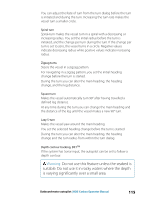
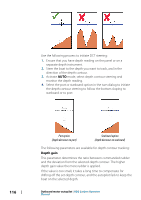
If the value is set too high, the overshoot increases and the steering is unstable. Contour Cross Angle (CCA) The CCA is an angle that is added to or subtracted from the set course. With this parameter you can make the boat yaw around the reference depth with lazy-s movements. The larger the CCA, the bigger yawing is allowed. If you the CCA set to zero there are no lazy-s movements. Ref. depth Use this parameter to change the reference depth which the boat will yar around when making Lazy-s movements. Course mode The Course mode combines the heading information from the steering compass and the positioning information from the GPS. In this mode, the vessel is steered along a calculated track line in a direction set by the user. If the vessel's heading is drifting away from the original heading due to current and/or wind, the vessel follows the line with a crab angle. 1. Turn the vessel to the desired heading. 2. Activate Course mode. The autopilot draws an invisible bearing line based on the current heading from the boat's position. In Course mode, the autopilot uses position information to calculate the cross track error, and to automatically keep your track straight. Use the port and starboard (1 or 10 degrees) arrow buttons in the Autopilot Controller to change the bearing line while in Course mode. Outboard motor autopilot | HDS Carbon Operator Manual 117
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
110
-
111
-
 112
112 -
 113
113 -
 114
114 -
 115
115 -
 116
116 -
 117
117 -
 118
118 -
 119
119 -
 120
120 -
 121
121 -
 122
122 -
123
-
124
-
125
-
126
-
127
-
128
-
129
-
130
-
131
-
132
-
133
-
134
-
135
-
136
-
137
-
138
-
139
-
140
-
141
-
142
-
143
-
144
-
145
-
146
-
147
-
148
-
149
-
150
-
151
-
152
-
153
-
154
-
155
-
156
-
157
-
158
-
159
-
160
-
161
-
162
-
163
-
164
-
165
-
166
-
167
-
168
-
169
-
170
-
171
-
172
-
173
-
174
-
175
-
176
-
177
-
178
-
179
-
180
-
181
-
182
-
183
-
184
-
185
-
186
-
187
-
188
-
189
-
190
-
191
-
192
-
193
-
194
-
195
-
196
-
197
-
198
 |
 |