Magellan RoadMate 6000T Manual - Swedish - Page 114
Skärmen för GPS-status
 |
UPC - 763357115055
View all Magellan RoadMate 6000T manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 114 highlights
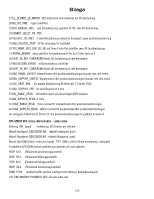
Bilaga Skärmen för GPS-status GPS-status skärmstruktur - första sidan CH 01 02 03 04 05 06 07 08 09 10 11 12 13 14 PRN d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 AZ d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 EL d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 SNR d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 U/N c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 Kanalerna räknas upp i nummerordning från 1 till 12. Där: d1: Satellitens PRN-nummer med "e" eller "E" till höger betyder att efemeriddata emottagits, "v" eller "V" betyder att bekräftad efemeriddata emottagits (dubbelkollad). "E" eller "V" innebär att även satellittiden för denna kanal emottagits. d2: Azimut i grader d3: Elevationsvinkel i grader d4: SNR (förhållandet mellan signal och störning), förhållandet anges i Hz, inte i dB c1: U - Används för positionsbestämning. N - Används inte för positionsbestämning. Kod för felaktig fixpunkt 0 PVT_OK :godkänd fixpunkt 2 ILLEGAL_ALT: ogiltig höjd < -10 km eller > 17,5 km 4 POSITION_JUMP: för stort positionshopp mellan två tidpunkter (480 km) 5 ILLEGAL_VELOCITY_OR_ALT: maxhastighet 1530 km 7 TOO_BIG_ACCELERATION max 15 m runt 1,5 g 8 TOO_SMALL_ALTITUDE -10 000 m 9 TOO_BIG_ALTITUDE 17 500 m 10 TOO_BIG_PDOP max PDOP 50 11 SATS_BELOW_MASK_ANGLE satellitens elevationsvinkel är mindre än maskvinkeln 16 ILL_DEFINED_3D_MATRIX 3X3-matris kan inte inverteras vid 3D-bestämning 105
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
 109
109 -
 110
110 -
 111
111 -
 112
112 -
 113
113 -
 114
114 -
 115
115 -
 116
116 -
 117
117 -
 118
118
 |
 |
