Seagate Cheetah NS 10K Cheetah NS 10K.2 SAS Product Manual - Page 25
Table 13, DC power requirements, General DC power requirement notes.
 |
View all Seagate Cheetah NS 10K manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 25 highlights
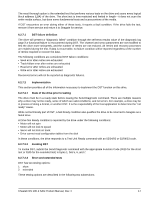
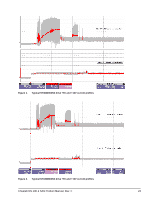
transient response. [6] During idle, the drive heads are relocated every 60 seconds to a random location within the band from three-quarters to maximum track. Table 13: ST3450802SS DC power requirements Voltage 1.5 Gb mode Notes (Amps) (Amps) +5V +12V [2] 3 Gb mode (Amps) (Amps) +5V +12V [2] 6 Gb mode (Amps) (Amps) +5V +12V [2] Regulation Avg idle current DCX Maximum starting current (peak DC) DC 3σ (peak AC) AC 3σ Delayed motor start (max) DC 3σ Peak operating current: Typical DCX Maximum DC 3σ Maximum (peak) DC 3σ [5] [1] [6] ±5% 0.36 [3] 0.47 [3] 0.92 [1] [4] 0.44 [1] 0.38 [1] 0.38 1.00 ±5% [2] 0.33 ±5% 0.38 1.78 0.61 4.04 1.00 0.04 0.46 0.61 0.39 0.64 0.40 2.46 1.02 ±5% [2] 0.32 ±5% 0.32 1.78 0.46 4.14 0.76 0.04 0.46 0.60 0.42 0.61 0.43 2.48 1.04 ±5% [2] 0.31 1.77 3.45 0.04 0.61 0.62 2.42 [1] Measured with average reading DC ammeter or equivalent sampling scope. Instantaneous +12V current peaks will exceed these values. Power supply at nominal voltage. N (number of drives tested) = 6, 35 Degrees C ambient. [2] For +12 V, a -10% tolerance is allowed during initial spindle start but must return to ±5% before reaching 10,000 RPM. The ±5% must be maintained after the drive signifies that its power-up sequence has been completed and that the drive is able to accept selection by the host initiator. [3] See +12V current profile in Figure 1. [4] This condition occurs after OOB and Speed Negotiation completes but before the drive has received the Notify Spinup primitive. [5] See paragraph 7.2.1, "Conducted noise immunity." Specified voltage tolerance includes ripple, noise, and transient response. [6] During idle, the drive heads are relocated every 60 seconds to a random location within the band from three-quarters to maximum track. General DC power requirement notes. 1. Minimum current loading for each supply voltage is not less than 1.7% of the maximum operating current shown. 2. The +5V and +12V supplies should employ separate ground returns. 3. Where power is provided to multiple drives from a common supply, careful consideration for individual drive power requirements should be noted. Where multiple units are powered on simultaneously, the peak starting current must be available to each device. 4. Parameters, other than spindle start, are measured after a 10-minute warm up. 5. No terminator power. Cheetah NS 10K.2 SAS Product Manual, Rev. F 21
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
 20
20 -
 21
21 -
 22
22 -
 23
23 -
 24
24 -
 25
25 -
 26
26 -
 27
27 -
 28
28 -
 29
29 -
 30
30 -
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
 |
 |
