Garmin GPS 17HVS Technical Specifications - Page 27
APPENDIX B: BINARY PHASE OUTPUT FORMAT, Position Record
 |
UPC - 753759052546
View all Garmin GPS 17HVS manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 27 highlights
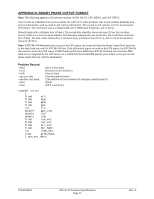
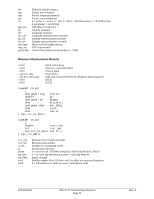
APPENDIX B: BINARY PHASE OUTPUT FORMAT Note: The following applies to all software versions of GPS 16LVS, GPS 16HVS, and GPS 17HVS. Two records are transmitted once per second by the GPS 16/17 series products. One record contains primarily postprocess information, such as position and velocity information. The second record contains receiver measurement information. The records are sent at a default baud rate of 9600 baud, 8 data bits, and no parity. Records begin with a delimiter byte (10 hex). The second byte identifies the record type (33 hex for a position record, 34 hex for a receiver measurement). The third byte indicates the size of the data. The fourth byte is the first byte of data. The data is then followed by a checksum byte, a delimiter byte (10 hex), and an end-of-transmission character (03 hex). Note: If RTCM-104 differential data is sent to the GPS sensor, the board will reset the Phase Output Data baud rate to the same baud rate used for RTCM-104 data. If the differential inputs are used on the GPS sensor, the RTCM-104 data must be sent to the GPS sensor at 9600 baud (preferred) or 4800 baud. RTCM-104 baud rates less than 4800 baud are not supported by the GPS sensors as it would limit bus bandwidth past the point where a once-per-second phase output data rate could be maintained. Position Record - 0x10 - 0x33 - 0x40 - cpo_pvt_data - one-byte checksum - 0x10 - 0x03 (DLE is first byte) (Position record identifier) (Size of data) (See description below) (The addition of bytes between the delimiters should equal 0) (DLE) (ETX is last byte) typedef struct { float alt; float epe; float eph; float epv; int fix; double gps_tow; double lat; double lon; float lon_vel; float lat_vel; float alt_vel; float msl_hght; int leap_sec; long grmn_days; } cpo_pvt_data; 190-00228-21 GPS 16/17 Technical Specifications Page 23 Rev. A
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
 22
22 -
 23
23 -
 24
24 -
 25
25 -
 26
26 -
 27
27 -
 28
28 -
 29
29 -
 30
30 -
 31
31 -
 32
32 -
33
-
34
-
35
-
36
-
37
 |
 |
