Garmin GPS 17HVS Technical Specifications - Page 32
RX Packet: Ephemeris Data, Byte Description, HEX Value
 |
UPC - 753759052546
View all Garmin GPS 17HVS manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 32 highlights
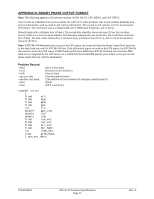
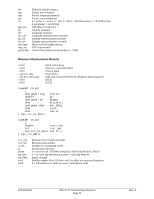
Next, the unit will send the specified number of packets containing the ephemeris information. An example packet is shown below. Each packet should be acknowledged as before (be sure to modify the ACK packet to indicate what type of packet being acknowledged-for ephemeris data, the ID is 0x35). RX Packet: Ephemeris Data Byte Description Delimiter Ephemeris data ID Number of bytes in data Ephemeris data . . . Checksum calculation Delimiter End of packet Name DLE IOP_SPC_EPH_DATA SIZE DATA . . . CHKSUM DLE ETX HEX Value 0x10 0x35 0x78 0x10 0x03 The data portion of each packet can then be parsed into an instance of the following structure. Each of these structures represents data from a single satellite. typedef struct /* ephemeris data record for SPC */ { sint16 wn; /* week number (weeks) */ float toc; /* reference time of clock parameters (s) */ float toe; /* reference time of ephemeris parameters (s) */ float af0; /* clock correction coefficient - group delay (s) */ float af1; /* clock correction coefficient (s/s) */ float af2; /* clock correction coefficient (s/s/s) */ float ura; /* user range accuracy (m) */ double e; /* eccentricity (-) */ double sqrta; /* square root of semi-major axis (a) (m**1/2) */ double dn; /* mean motion correction (r/s) */ double m0; /* mean anomaly at reference time (r) */ double w; /* argument of perigee (r) */ double omg0; /* right ascension (r) */ double i0; /* inclination angle at reference time (r) */ float odot; /* rate of right ascension (r/s) */ float idot; /* rate of inclination angle (r/s) */ float cus; /* argument of latitude correction, sine (r) */ float cuc; /* argument of latitude correction, cosine (r) */ float cis; /* inclination correction, sine (r) */ float cic; /* inclination correction, cosine (r) */ float crs; /* radius correction, sine (m) */ float crc; /* radius correction, cosine (m) */ unsigned char iod; /* issue of data */ } SDM_spc_eph_type; 190-00228-21 GPS 16/17 Technical Specifications Page 28 Rev. A
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
 27
27 -
 28
28 -
 29
29 -
 30
30 -
 31
31 -
 32
32 -
 33
33 -
 34
34 -
 35
35 -
 36
36 -
 37
37
 |
 |
