Magellan RoadMate 6000T Manual - Danish - Page 114
Skærmbilledet GPS-status
 |
UPC - 763357115055
View all Magellan RoadMate 6000T manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 114 highlights
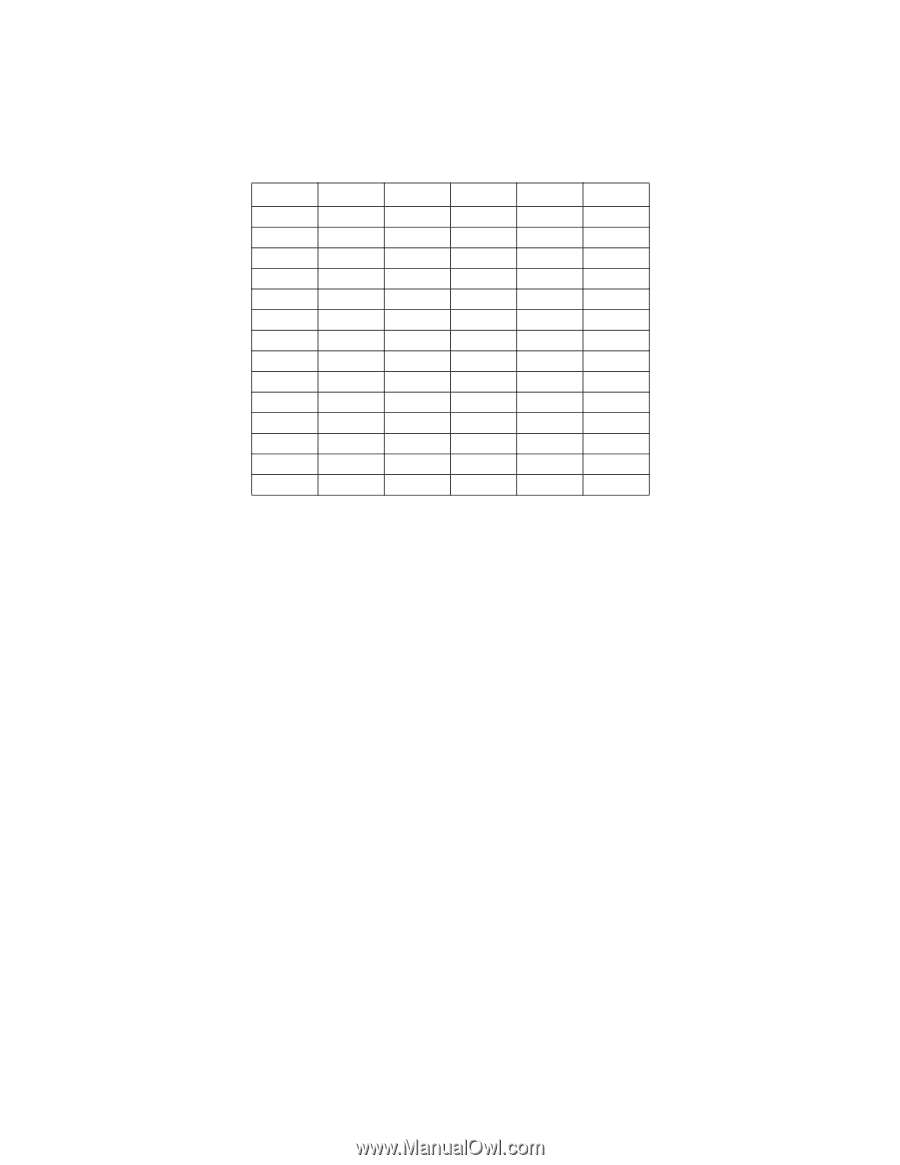
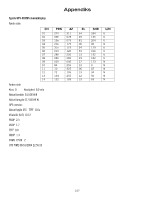
Appendiks Skærmbilledet GPS-status GPS-STATUS skærmstruktur - første side CH 01 02 03 04 05 06 07 08 09 10 11 12 13 14 PRN d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 AZ d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 EL d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 SNR d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 U/N c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 Den bestilles via kanalnummeret fra 1 til 12. Hvor: d1: Satellit-PRN-nummer med "e" eller "E" angivet til højre for betyder: har efemeride data, "v" eller "V" angivet til højre for betyder: har verificerede efemeride data (dobbelt check). "E" eller "V" betyder også: har satellittid til denne kanal. d2: Azimuth, i grader d3: Elevationsvinkel, i grader d4: SNR (signal for støjforhold), det er et forhold i Hz, ikke en dB-enhed c1: U - anvendt til positionsbestemmelse, N - ikke-anvendt til positionsbestemmelse Kode for dårlig korrektion 0 PVT_OK :god korrektion 2 ILLEGAL_ALT: ugyldig højde < -10 km eller > 17,5 km 4 POSITION_JUMP: for stort positionshop mellem to tidszoner (480 km) 5 ILLEGAL_VELOCITY_OR_ALT: maks. hastighed 1530 km 7 TOO_BIG_ACCELERATION maks. 15 m ca. 1,5 g 8 TOO_SMALL_ALTITUDE -10000 m 9 TOO_BIG_ALTITUDE 17.500 m 10 TOO_BIG_PDOP maks. PDOP 50 11 SATS_BELOW_MASK_ANGLE satellitelevationsvinkel er under maskevinkel 16 ILL_DEFINED_3D_MATRIX 3X3-matrix kan ikke inverteres i 3D-korrektion 105
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
 109
109 -
 110
110 -
 111
111 -
 112
112 -
 113
113 -
 114
114 -
 115
115 -
 116
116 -
 117
117 -
 118
118
 |
 |