Seagate ST3500630A Serial ATA Native Command Queuing (670K, PDF) - Page 6
Transferring Data, Register, Read FPDMA Queued Command
 |
UPC - 000067575145
View all Seagate ST3500630A manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 6 highlights
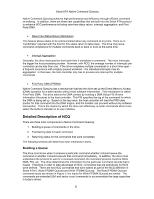
Serial ATA Native Command Queuing The commands also contain a force unit access (FUA) bit for high availability applications. When the FUA bit is set for a Write FPDMA Queued command, the drive will commit the data to media before returning success for the command. By using the FUA bit as necessary on writes, the host can manage the amount of data that has not been committed to media within the drive's internal cache. Register 7 6 5 4 3 2 1 0 Features Sector Count 7:0 Features (exp) Sector Count 15:8 Sector Count TAG Reserved Sector Count (exp) Reserved Sector Number LBA 7:0 Sector Number (exp) LBA 31:24 Cylinder Low LBA 15:8 Cylinder Low (exp) LBA 39:32 Cylinder High LBA 23:16 Cylinder High (exp) LBA 47:40 Device/Head FUA 1 Res 0 Reserved Command 60h Figure 1 Read FPDMA Queued Command One interesting field is the TAG field in the Sector Count register. Each queued command issued has a tag associated with it. The tag is a shorthand mechanism used between the host and the device to identify a particular outstanding command. Tag values can be between 0 and 31, although the drive can report support for a queue depth less than 32. In this case, tag values are limited to the maximum tag value the drive supports. Having tag values limited to be between 0 and 31 has some nice advantages, including that status for all commands can be reported in one 32-bit value. Each outstanding command must have a unique tag value. The Read and Write FPDMA Queued commands are issued just like any other command would be, i.e. the taskfile is written with the particular register values and then the Command register is written with the command opcode. The difference between queued and non-queued commands is what happens after the command is issued. If a non-queued command was issued, the drive would transfer the data for that command and then clear the BSY bit in the Status register to tell the host that the command was completed. When a queued command is issued, the drive will clear BSY immediately, before any data is transferred to the host. In queuing, the BSY bit is not used to convey command completion. Instead, the BSY bit is used to convey whether the drive is ready to accept a new command. As soon as the BSY bit is cleared, the host can issue another queued command to the drive. In this way a queue of commands can be built within the drive. Transferring Data NCQ takes advantage of a feature called First Party DMA to transfer data between the drive and the host. First Party DMA allows the drive to have control over programming the DMA engine for a data transfer. This is an important enhancement since only the drive knows the current angular and rotational position of the drive head. The drive can then select the next data transfer to minimize both seek and rotational latencies. The First Party DMA mechanism is effectively what allows the drive to re-order commands in the most optimal way. As an additional optimization, the drive can also return data out-of-order to further minimize the rotational latency. First Party DMA allows the drive to return partial data for a command, send partial data for another command, and then finish sending the data for the first command if this is the most efficient means for completing the data transfers. 6
-
 1
1 -
 2
2 -
 3
3 -
 4
4 -
 5
5 -
 6
6 -
 7
7 -
 8
8 -
 9
9 -
 10
10 -
 11
11 -
 12
12
 |
 |
