Seagate ST3500630NS Product Manual - Page 23
Operating power and current, Idle mode power, Standby mode, Table 6, DC power requirements, 8.1.1,
 |
View all Seagate ST3500630NS manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 23 highlights
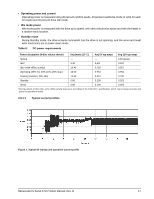
• Operating power and current Operating power is measured using 40 percent random seeks, 40 percent read/write mode (1 write for each 10 reads) and 20 percent drive idle mode. • Idle mode power Idle mode power is measured with the drive up to speed, with servo electronics active and with the heads in a random track location. • Standby mode During Standby mode, the drive accepts commands, but the drive is not spinning, and the servo and read/ write electronics are in power-down mode. Table 6: DC power requirements Power dissipation (4-disc values shown) Avg (watts 25° C) Avg 5V typ amps Avg 12V typ amps Spinup - - 2.80 (peak) Idle* 9.30 0.611 0.520 Idle* (with offline activity) 10.40 0.719 0.567 Operating (40% r/w, 40% seek, 20% inop.) 13.00 0.772 0.762 Seeking (random, 20% idle) 12.60 0.613 0.795 Standby 0.80 0.106 0.023 Sleep 0.80 0.106 0.023 *During periods of drive idle, some offline activity may occur according to the S.M.A.R.T. specification, which may increase acoustic and power to operational levels. 2.8.1.1 Typical current profiles Figure 1. Typical 5V startup and operation current profile Barracuda ES Serial ATA Product Manual, Rev. B 17
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
 18
18 -
 19
19 -
 20
20 -
 21
21 -
 22
22 -
 23
23 -
 24
24 -
 25
25 -
 26
26 -
 27
27 -
 28
28 -
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
 |
 |
