Magellan RoadMate 6000T Manual - French Canadian - Page 116
Écran Statut GPS
 |
UPC - 763357115055
View all Magellan RoadMate 6000T manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 116 highlights
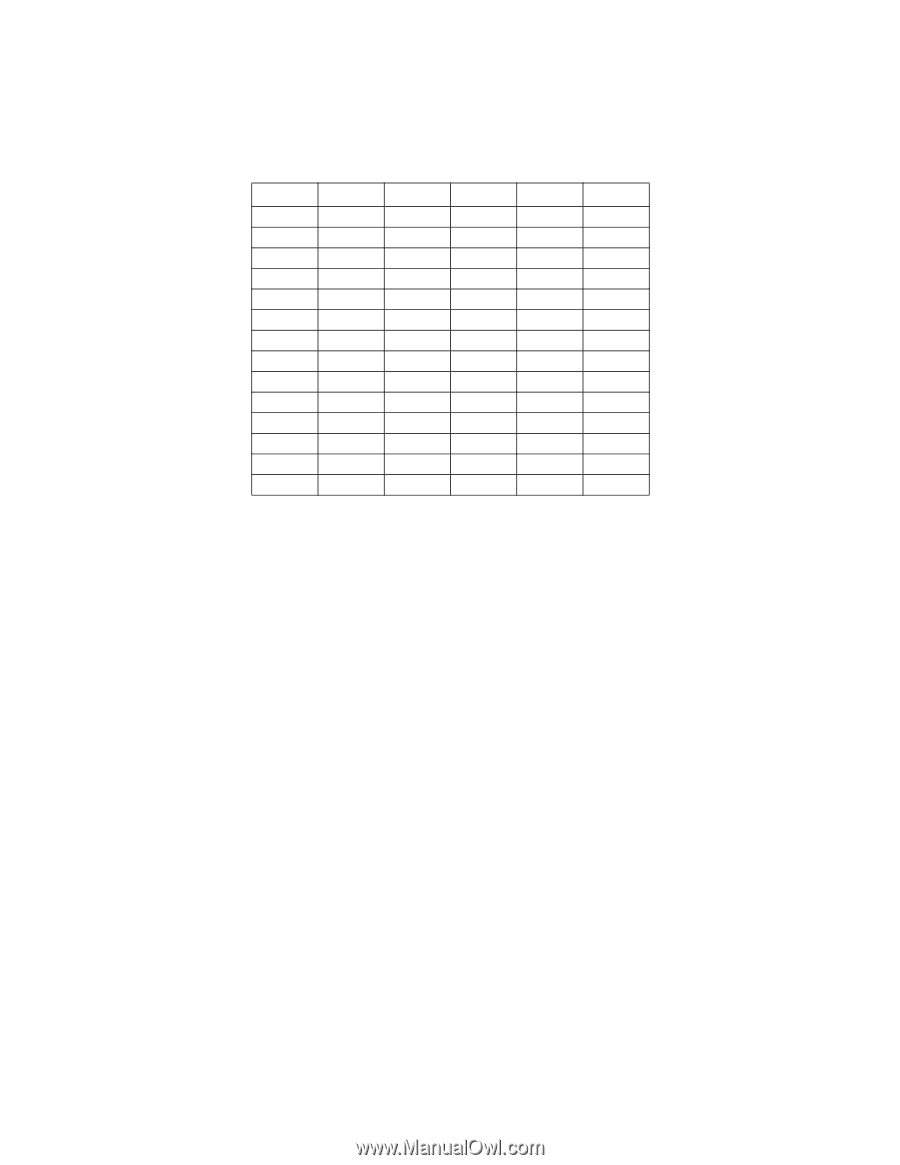
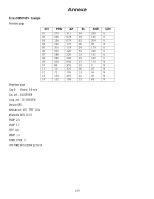
Annexe Écran Statut GPS Structure de l'écran STATUT GPS - Première page CH 01 02 03 04 05 06 07 08 09 10 11 12 13 14 PRN d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 d1 AZ d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 EL d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 SNR d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 d4 U/N c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 c1 L'ordre suit le numéro des canaux, de 1 à 12. Codification : d1 : Numéro pseudo-aléatoire (PRN) du satellite. À droite, la lettre « e » ou « E » indique que des données éphémérides ont été acquises, tandis que la lettre « v » ou « V » indique que les données éphémérides ont été vérifiées (double vérification). « E » ou « V » signifie également l'acquisition de l'heure satellite pour ce canal. d2 : Azimut, en degrés. d3 : Angle d'élévation, en degrés. d4 : SNR (signal to noise ratio : rapport signal sur bruit), exprimé en Hz, et non en dB. c1: U - Utilisé pour le relevé de position, N - Non utilisé pour le relevé de position. Code de position incorrecte. 0 PVT_OK :bonne position 2 ILLEGAL_ALT: altitude illégale < -10 km ou > 17,5 km 4 POSITION_JUMP: changement très marqué de position entre deux époques (300 miles) 5 ILLEGAL_VELOCITY_OR_ALT: vitesse max. 951 miles 7 TOO_BIG_ACCELERATION max. 15 m environ 1,5 g 8 TOO_SMALL_ALTITUDE -10 000 m 9 TOO_BIG_ALTITUDE 17 500 m 10 TOO_BIG_PDOP PDOP max. 50 11 SATS_BELOW_MASK_ANGLE L'angle d'élévation du satellite est inférieur à l'angle de masque. 16 ILL_DEFINED_3D_MATRIX Une matrice 3X3 ne peut pas être inversée en position 3D. 107
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
110
-
 111
111 -
 112
112 -
 113
113 -
 114
114 -
 115
115 -
 116
116 -
 117
117 -
 118
118 -
 119
119 -
 120
120 -
 121
121
 |
 |