Magellan RoadMate 6000T Manual - French Canadian - Page 117
UTC TIME MM/DD/YY HH:MM:SS temps UTC sans zone locale
 |
UPC - 763357115055
View all Magellan RoadMate 6000T manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 117 highlights
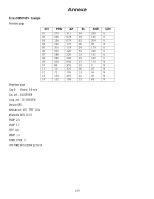
Annexe 17 ILL_DEFINED_2D_MATRIX Une matrice 2X2 ne peut pas être inversée en position 2D. 20 NO_SAT_TIME aucun temps satellite 23 NOT_ENOUGH_SATS satellites insuffisants pour calculer une position 2D ou 3D. 24 CANNOT_SELECT_FIX_TYPE : 30 VELOCITY_2D_ONLY 2 positions satellites seulement pour la vitesse, aucun relevé de position. 31 BAD_VELOCITY_PDOP 50 trop grand PDOP pour la vitesse 32 TOO_MANY_SATS_FOR_2D_VEL 4 satellites ou plus, mais position 2D calculée. 51 WRONG_NUMSAT nombre de satellites pour la position > 12 ou inférieur à 2. 56 LOOP_3D_NOT_CONVERGING Position initiale 3D non convergente 57 MILLISECOND_ERROR Un écart abrupt en milliseconde est survenu. 58 LOOP_2D_NOT_CONVERGING Position initiale 2D non convergente 59 BAD_RANGE_CHITEST; Echec du test Ki des résidus postfix de l'intervalle 60 BAD_DOPPLER_CHITEST : Echec du test Ki des résidus doppler postfix 61 OSC_DRIFT_ERR décalage d'horloge trop important (60 Hz pour XO - 7,5 Hz pour TCXO) 62 BAD_DOPPLER_ERR : erreurs Doppler trop importantes (4 m/s) 63 BIG_RANGE_RESID : 110 m/40 m dépend du ttagl virtuel/facteurs DGPS 64 BIG_DOPPLER_RESID : 0,7 m/s 65 HUGE_RANGE_RESID 10 km normal pour résidus postfix de l'intervalle 66 HUGE_DOPPLER_RESID 100 m/s normal pour résidus postfix doppler En règle générale, le code incorrect est 20 et 23. Si le calcul de position est correct, la valeur sera nulle. Structure de l'écran STATUT GPS - Deuxième page Cap XXX (degrés) Accélération XX.X (mètres par seconde) Lat. act. : DDD.DDDDD W/E (latitude actuelle, en degrés) Long. act. : DDD.DDDDD N/S (longitude actuelle, en degrés) Altitude actuelle XXXX (altitude en mètres par rapport au niveau de la mer) TTFF XXXXs (Temps d'acquisition de la première position en secondes) Nombre de satellites (U/T) XX/XX (nombre de satellites utilisés et poursuivis) PDOP XX.X (Dilution de précision de la position) VDOP XX.X (Dilution de précision verticale) TDOP XX.X (Dilution de précision de temps) HDOP XX.X (Dilution de précision horizontale) FOMS P/V/H (données optimales pour la position, la vitesse et le cap dans la correspondance cartographique) UTC TIME MM/DD/YY HH:MM:SS (temps UTC sans zone locale) 108
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
110
-
111
-
 112
112 -
 113
113 -
 114
114 -
 115
115 -
 116
116 -
 117
117 -
 118
118 -
 119
119 -
 120
120 -
 121
121
 |
 |
