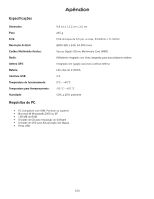
Magellan RoadMate 6000T Manual - Portuguese - Page 115
UTC TIME MM/DD/YY HH:MM:SS hora UTC sem zona local
 |
UPC - 763357115055
View all Magellan RoadMate 6000T manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 115 highlights
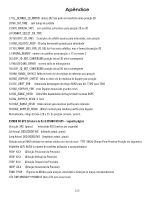
Apêndice 17 ILL_DEFINED_2D_MATRIX matriz 2X2 não pode ser invertida numa posição 2D 20 NO_SAT_TIME sem tempo de satélite 23 NOT_ENOUGH_SATS sem satélites suficientes para posição 2D ou 3D 24 CANNOT_SELECT_FIX_TYPE 30 VELOCITY_2D_ONLY 2 posições de satélite apenas para velocidade, sem posição 31 BAD_VELOCITY_PDOP 50 pdop demasiado grande para velocidade 32 TOO_MANY_SATS_FOR_2D_VEL há 4 ou mais satélites, mas é fornecida posição 2D 51 WRONG_NUMSAT número de satélites para posição > 12 ou menos 2 56 LOOP_3D_NOT_CONVERGING posição inicial 3D não é convergente 57 MILLISECOND_ERROR ocorreu salto de milisegundos 58 LOOP_2D_NOT_CONVERGING posição inicial 2D não é convergente 59 BAD_RANGE_CHITEST; falha no teste chi de resíduos de intervalo pós-posição 60 BAD_DOPPLER_CHITEST falha no teste chi de resíduos de doppler pós-posição 61 OSC_DRIFT_ERR demasiada derrapagem de relógio 60HZ para XO, 7,5HZ para TCXO 62 BAD_DOPPLER_ERR erros Doppler demasiado grandes 4m/s 63 BIG_RANGE_RESID 110m/40m dependendo de ttagl virtual/ factores DGPS 64 BIG_DOPPLER_RESID 0,7m/s 65 HUGE_RANGE_RESID 10km normal para resíduos postfix para intervalo 66 HUGE_DOPPLER_RESID 100m/s normal para resíduos postfix para doppler Normalmente, código Errado é 20 e 23. Se posição correcta, seria 0. ESTADO DO GPS Estrutura do Ecrã ESTADO DO GPS - segunda página Direcção XXX (graus) velocidade XX,X (metros por segundo) Lat Actual: DDD.DDDDD W/E (latitude actual, graus) Long Actual: DDD.DDDDD N/S (longitude actual, graus) Altitude actual XXXX (altitude em metros médios do nível do mar) TTFF XXXXs (Tempo-Para-Primeira-Posição em segundos) #Satéllite (U/T) XX/XX (o número de satélites utilizados e acompanhados) PDOP XX.X (Diluição Posicional da Precisão) VDOP XX.X (Diluição Vertical da Precisão) TDOP XX.X (Diluição Temporal da Precisão) HDOP XX.X (Diluição Horizontal da Precisão) FOMS P/V/H (Figuras de Méritos para posição, velocidade e direcção no mapa correspondentes) UTC TIME MM/DD/YY HH:MM:SS (hora UTC sem zona local) 106
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
 110
110 -
 111
111 -
 112
112 -
 113
113 -
 114
114 -
 115
115 -
 116
116 -
 117
117 -
 118
118
 |
 |
