Seagate ST3300655LC Cheetah 15K.5 SCSI Product Manual - Page 50
Drive mounting, Grounding
 |
View all Seagate ST3300655LC manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 50 highlights
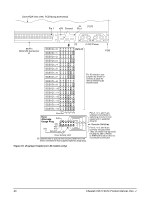
9.4 Drive mounting When mounting the drive using the bottom holes (x-y plane in Figure 7) care must be taken to ensure that the drive is not physically distorted due to a stiff non-flat mounting surface . The allowable mounting surface stiffness is 80 lb/in (14.0 N/mm). The following equation and paragraph define the allowable mounting surface stiffness: k * x = F < 15lb = 67N where 'k' represents the mounting surface stiffness (units of lb/in or N/mm), and 'x' represents the out-of-plane mounting surface distortion (units of inches or millimeters). The out-of-plane distortion ('x') is determined by defining a plane with three of the four mounting points fixed and evaluating the out-of-plane deflection of the fourth mounting point when a known force (F) is applied to the fourth point. Note. Before mounting the drive in any kind of 3.5-inch to 5.25-inch adapter frame, verify with Seagate Technology that the drive can meet the shock and vibration specifications while mounted in such an adapter frame. Adapter frames that are available may not have a mechanical structure capable of mounting the drive so that it can meet the shock and vibration specifications listed in this manual. 9.5 Grounding Signal ground (PCBA) and HDA ground are connected together in the drive and cannot be separated by the user. The equipment in which the drive is mounted is connected directly to the HDA and PCBA with no electrically isolating shock mounts. If it is desired for the system chassis to not be connected to the HDA/PCBA ground, the systems integrator or user must provide a nonconductive (electrically isolating) method of mounting the drive in the host equipment. Increased radiated emissions may result if you do not provide the maximum surface area ground connection between system ground and drive ground. This is the system designer's and integrator's responsibility. 44 Cheetah 15K.5 SCSI Product Manual, Rev. J
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
 45
45 -
 46
46 -
 47
47 -
 48
48 -
 49
49 -
 50
50 -
 51
51 -
 52
52 -
 53
53 -
 54
54 -
 55
55 -
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
 |
 |
