Seagate ST336807FC Cheetah 10K.7 FC Product Manual - Page 85
Motor start controls, SEL_6 through SEL_0 ID lines, Note., 5.11.1, Parallel Enclosure Services
 |
View all Seagate ST336807FC manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 85 highlights
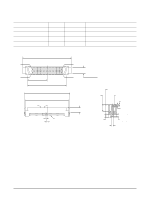
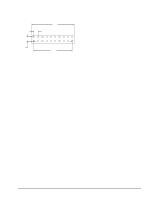
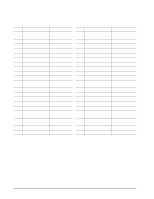
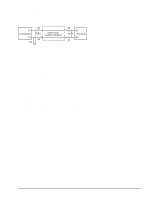
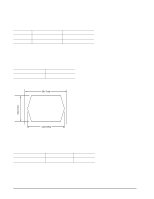
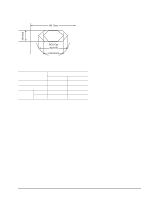
9.5.10 Motor start controls The drive's motor is started according to the Start_1 and Start_2 signals described in Table 34. The state of these signals can be wired into the backplane socket or driven by logic on the backplane. Table 34: Motor start control signals Case 1 2 3 Start_2 Low High Low 4 High Start_1 Low Low High High Motor spin function Motor spins up at DC power on. Motor spins up only when SCSI Start command is received. Motor spins up after a delay of 12 seconds times the modulo 8 value of the numeric SEL ID of the drive from DC power on. The drive will not spin up. 9.5.11 SEL_6 through SEL_0 ID lines The SEL_6 through SEL_0 ID lines determine drive address, and, optionally, for an Enclosure Services Interface. When the Parallel ESI line is high, the enclosure backpanel must provide address information on the SEL line. Refer to table 35 for a mapping of SEL to FC-AL physical addresses (AL_PA). You can think of the SEL lines as the equivalent of a backpanel logic plug. The drives does not provide pull up resistors on these lines. The backpanel is required to provide high and low inputs to the SEL_ID lines per the specifications in table 37 on page 75. Note. Table 35 gives AL_PA values for each SEL value. The first entry in the table is SEL_ID 00. The last entry is SEL_ID 7D. SEL_ID 7E is AL_PA 00 which is not valid for an NL_Port, so is not included in the table. Also, SEL_ID 7Fh does map to a valid AL_PA; however, this value signals the drive that physical addresses are not being assigned using the SEL lines and that a "soft" address will be determined by FC-AL loop initialization. When the Parallel ESI line is low, the enclosure backpanel logic switches to ESI mode if supported. There are two modes of ESI, seven bits of enclosure status and a bidirectional mode. ESI support and the mode are determined by the drive using a discovery process. Refer to the Fibre Channel Interface Manual for a description of ESI operation. 9.5.11.1 Parallel Enclosure Services Interface (ESI) The parallel ESI line is an output from the drive. This line provides the enclosure with an indication of the present function of the SEL lines. A high level, the default state, indicates the drive requires address information on the SEL lines. A low level indicates the drive is attempting an ESI transfer. The enclosure may not support ESI on any or all drive locations. It may only support the address function. Support of ESI is discovered by the drive. Refer to the Fibre Channel Interface Manual for a description of ESI operations. Cheetah 10K.7 FC Product Manual, Rev. D 73
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
 80
80 -
 81
81 -
 82
82 -
 83
83 -
 84
84 -
 85
85 -
 86
86 -
 87
87 -
 88
88 -
 89
89 -
 90
90 -
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
 |
 |
