Hitachi DK23BA-20 Owners Manual - Page 16
Drive Usage Condition Specifications - used
 |
View all Hitachi DK23BA-20 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 16 highlights
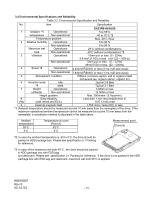
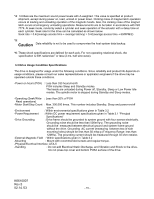
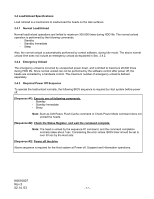
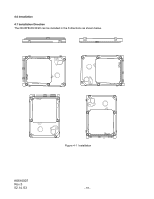
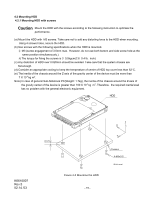
*4 : 3.9 Bels are the maximum sound power levels with A-weighted. This value is specified at product shipment, except during power on, load, unload or power down. Clicking noise of magnet latch operation occurs at loading and unloading operation of the magnetic heads. Also, the clicking noise of the magnet latch occurs at emergency unloading operations. Measurements are to be taken in accordance with ISO 7779. At seek mode, randomly select a cylinder and seek operation of the actuator with a delay time at each cylinder. Seek rate for the drive can be calculated as shown below. Seek rate = 0.4/(average access time + average latency) = 0.4/(average access time + 60/RPM/2) *5 : Caution Data reliability is not to be used to compromise the host system data backup. *6 :These shock specifications are defined for each axis. For non-operating rotational shock, the specification is 50K radian/sec2 or less (2 ms, half sine wave). 3.3 Drive Usage Condition Specifications The drive is designed for usage under the following conditions. Since reliability and product life depends on usage conditions, please consult our sales representatives or application engineers if the drive may be operated outside these conditions. -Power on hours (POH) : Less than 333 hours/month POH includes Sleep and Standby modes. The heads are unloaded during Power off, Standby, Sleep or Low Power Idle modes. The spindle motor is stopped during Standby and Sleep modes. -Operating (Seek/Write : Less than 20% of POH Read operations) -Motor Start/Stop Count : Max. 300,000 times. This number includes Standby, Sleep and power-on/off count. -Environment : Within environmental specifications given in Table 3.2 -Power Requirement : Within DC power requirement specifications given in Table 3.1 "Principal Specifications" -Drive Grounding : Drive frame should be grounded to system ground with four screws electrically. Grounding noise should be less than 500mVp-p. The grounding noise should be measured between electrical ground and system frame ground without the drive. Grounding AC current (measuring between two of side mounting holes) should be less than 50 mAp-p (Frequency Range: less than 12MHz). The grounding current should be measured through 50 ohm resistor. -External Magnetic Field : Within specifications given in Table 3.2 -Mounting : Mount with recommended screws and regular torque. -Physical/Electrical Interface: ATA-5 -Handling : Do not add Electrical Static Discharge, and Vibration and Shock to the drive. Do not press top cover and bottom PCBA surface of the drive. K6610007 Rev.5 02.14.'03 - 16 -
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
 11
11 -
 12
12 -
 13
13 -
 14
14 -
 15
15 -
 16
16 -
 17
17 -
 18
18 -
 19
19 -
 20
20 -
 21
21 -
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
110
-
111
-
112
-
113
-
114
 |
 |
