Dewalt DW074KD Instruction Manual - Page 43
Error total = AA - A - BB - B, Distancia entre paredes, Error permitido, CONTROL DE CALIBRADO DEL
 |
View all Dewalt DW074KD manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 43 highlights
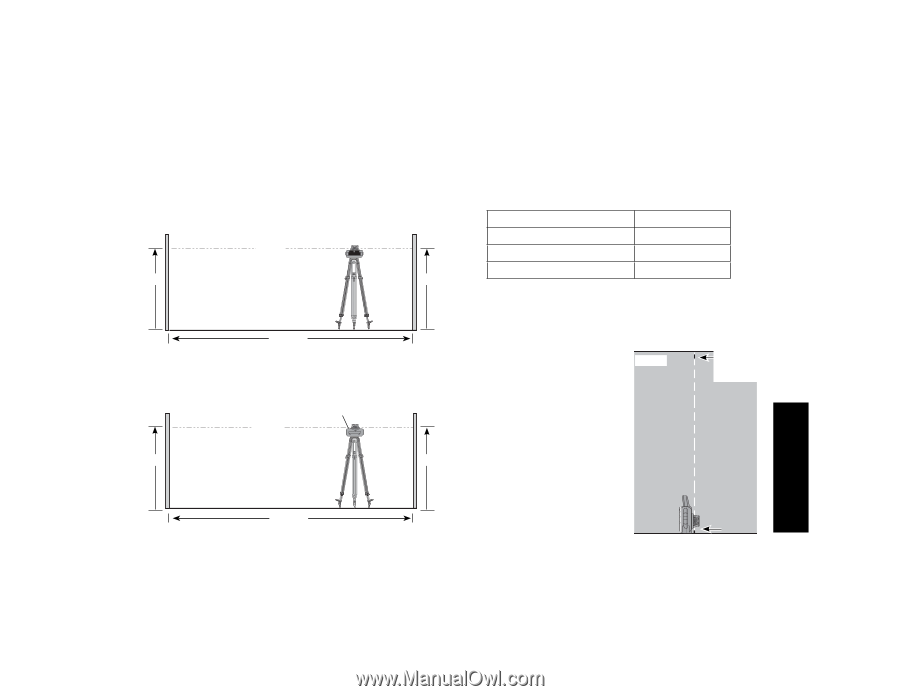
2. Monte la unidad láser en el trípode de modo que el eje X apunte directamente hacia una de las paredes. 3. Encienda la unidad láser y permita que se autonivele. 4. Marque y mida los puntos A y B en las paredes, como lo muestra la Figura 15. FIG. 15 RAYO A B L 5. Gire la unidad láser 180º de modo que el eje X apunte directamente hacia la pared contraria. 6. Permita que la unidad láser se autonivele y marque y mida los puntos AA y BB en las paredes, como lo muestra la Figura 16. FIG. 16 UNIDAD LÁSER ROTADA EN 180º RAYO AA BB L 7. Calcule el margen total de error con la siguiente ecuación: Error total = (AA - A) - (BB - B) 8. Compare el error total con los límites permitidos que aparecen en la siguiente tabla. Distancia entre paredes Error permitido L = 15,3 m (50 pies) 6 mm (1/4 pulg.) L = 22,9 m (75 pies) 9 mm (3/8 pulg.) L = 30,5 m (100 pies) 12 mm (1/2 pulg.) CONTROL DE CALIBRADO DEL NIVEL (EJE Y) Repita el procedimiento anterior, pero con la unidad láser posicionada de modo que el eje Y esté apuntando directamente hacia las paredes. CONTROL DE ERROR DE LA PLOMADA (FIG. 17) 1. Con una plomada estándar FIG. 17 como referencia, marque la parte superior e inferior de una pared (asegúrese de marcar la pared y no el piso y el techo.) 2. Ponga el láser rotativo firmemente sobre el piso a aproximadamente 1 m (3 pies) de la pared. 3. Encienda el láser y nivélelo con los botones de flecha para centrar la burbuja. Para una mayor visibilidad, opere la unidad en una velocidad de rotación menor, verificando que el rayo láser esté pasando por la marca en la parte MARCAS EN LA PARED Español 41
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
 38
38 -
 39
39 -
 40
40 -
 41
41 -
 42
42 -
 43
43 -
 44
44 -
 45
45 -
 46
46 -
 47
47 -
 48
48
 |
 |