Sharp AR-RB1 Service Manual - Page 13
ADU delivery operation AR-D19 the installed
 |
View all Sharp AR-RB1 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 13 highlights
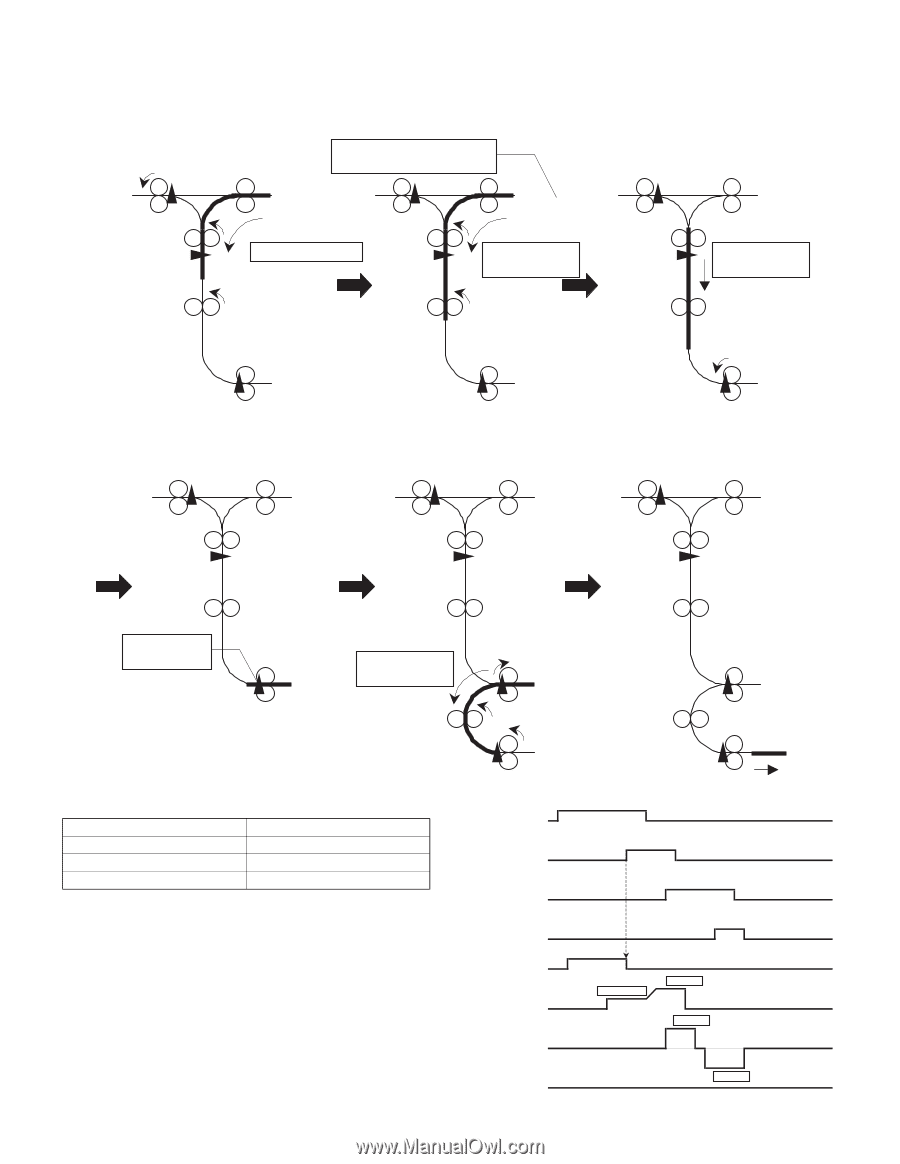
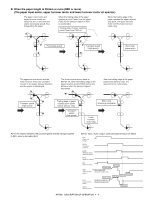
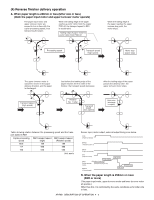
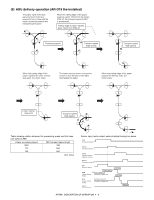
(5) ADU delivery operation (AR-D19 the installed) The paper input motor and upper turnover motor are caused to turn in time with the copier processing speed, thus transporting the paper. When the trailing edge of the paper reaches a point 13mm from the copier POD off, the transport speed in RB1 is accelerated. Trailing edge of paper reaches point 13mm from POD off Processing speed Transport speed (high speed) Transport speed (high speed) When the trailing edge of the paper reaches the lower reverse stop point, the motor stops. The lower turnover motor is caused to revolve in the direction of the ADU, discharging the paper. When the trailing edge of the paper passes the delivery roller, the motor stops. Lower reverse stop point Transport speed (high speed) Table showing relation between the processing speed and the transport speed in RB1 Copier processing speed 58.5 117 140 RB1 transport speed (high) 195 550 550 Unit: mm/s Sensor input, motor output, solenoid output timing is as below. POD (Paper exit sensor) BPPD1 (Transport sensor 1) BPRD (Reverse section detection sensor) BPPD2 (Transport sensor 2) BIM (Paper-in motor) Process speed BRM (Direction of paper-in) (Upper reverse motor) (Direction of paper-out) BTM (Lower reverse motor) (Direction of paper-in) (Direction of paper-out) BGSOL (Gate solenoid) High speed High speed High speed AR-RB1 DESCRIPTION OF OPERATION 4 - 6
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
 8
8 -
 9
9 -
 10
10 -
 11
11 -
 12
12 -
 13
13 -
 14
14 -
 15
15 -
 16
16 -
 17
17 -
 18
18 -
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
 |
 |