Lowrance HDS-5 Gen2 Installation Manual - Page 34
Ethernet
 |
View all Lowrance HDS-5 Gen2 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 34 highlights
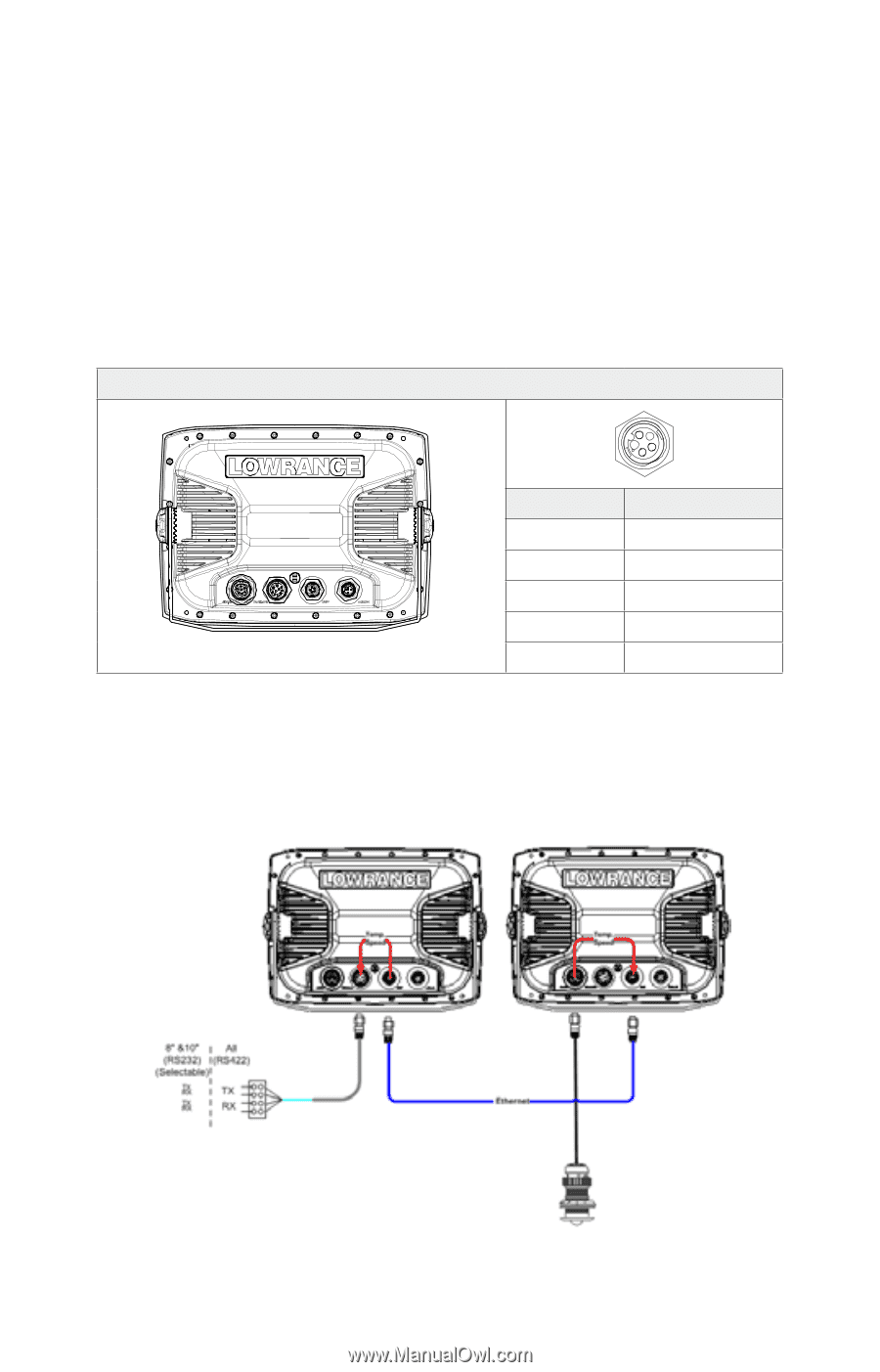
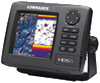
Ethernet The HDS system uses an Ethernet network to interconnect high bandwidth devices such as other HDS displays, radar and sonar. Each HDS display has one network port with 5 pin connector. Ethernet network has orange connectors that are retained by a bayonet type locking collar. If more than two network devices need to be connected, use the optional Network Expansion Port (NEP). which will allow for the connection of up to five ethernet devices or a StructureScan module which will allow for the connection of up to three ethernet devices. Ethernet connector 54 1 2 3 Pin Function 1 TX + 2 TX - 3 RX + 4 RX - 5 GND The Ethernet connection carries sonar, Structurescan and radar data between two or more displays. Sonar data (water,speed, depth and temperature) is bridged onto the Ethernet bus. Sonar data is only bridged if network sonar is turned on. Below is an example of sonar data being shared between two displays. 33
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
 29
29 -
 30
30 -
 31
31 -
 32
32 -
 33
33 -
 34
34 -
 35
35 -
 36
36 -
 37
37 -
 38
38 -
 39
39 -
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
 |
 |