Husqvarna AUTOMOWER 520 Owner Manual - Page 4
Working method, 2.4 Movement pattern, 2.5 Finding the charging station
 |
View all Husqvarna AUTOMOWER 520 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 4 highlights
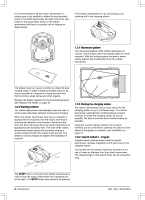
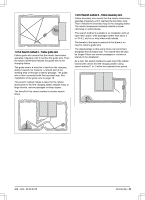
It is recommended to let the robotic lawnmower to mainly mow in dry weather to obtain the best possible result. The robotic lawnmower can also mow in the rain, however wet grass easily sticks on the robotic lawnmower and there is a greater risk of slipping on steep slopes. if the robotic lawnmower is in an active status, but standing still in the charging station. 1.2.4 Movement pattern The movement pattern of the robotic lawnmower is random, which means that a movement pattern is never repeated. With this cutting system the lawn is mown evenly without any mowing lines from the robotic lawnmower. The blades must be in good condition to obtain the best mowing result. In order to keep the blades sharp for as long as possible it is important to keep the lawn free from branches, small stones and other objects. Replace the blades regularly for the best mowing result. See Replace the blades on page 43. 1.2.3 Working method The robotic lawnmower automatically mows the lawn. It continuously alternates between mowing and charging. When the robotic lawnmower body hits an obstacle or approaches the boundary wire the robotic lawnmower reverses and selects a new direction. Sensors at the front and back will sense when the robotic lawnmower is approaching the boundary wire. The front of the robotic lawnmower always passes the boundary wire by a specific distance before the mower turns around. The distance can be changed to adapt to the installation if required. 1.2.5 Finding the charging station The robotic lawnmower can be set to search for the charging station in up to 3 different ways. The robotic lawnmower automatically combines these 3 search methods to locate the charging station as fast as possible, but also to avoid as much tracks forming as possible. Using the manual settings options, the 3 search methods can be combined to optimize the search for the shape of the garden in question, see Installation on page 27. 1.2.5.1 Search method 1 - Irregular Irregular search method means that the robotic lawnmower operates irregularly until it gets close to the charging station. The benefit with this search method is that there is no risk of tracks on the lawn from the robotic lawnmower. The disadvantage is that search times can be somewhat long. The STOP button on the top of the robotic lawnmower is used to stop the robotic lawnmower from operating out on the lawn. The STOP button also needs to be pressed 4 - Introduction 362 - 002 - 06.02.2018
-
 1
1 -
 2
2 -
 3
3 -
 4
4 -
 5
5 -
 6
6 -
 7
7 -
 8
8 -
 9
9 -
 10
10 -
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
 |
 |
