Hitachi HTS541010G9AT00 Specifications - Page 69
S.M.A.R.T. Function
 |
UPC - 000061425019
View all Hitachi HTS541010G9AT00 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 69 highlights
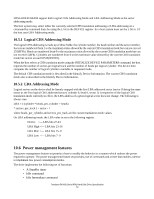
10.7.1 Performance Idle Mode This mode is usually entered immediately after Active mode command processing is complete, instead of conventional idle mode. In Performance Idle mode, all electronic components remain powered and full frequency servo remains operational. This provides instantaneous response to the next command. The duration of this mode is intelligently managed as described below. 10.7.2 Active Idle Mode In this mode, power consumption is 45-55% less than that of Performance Idle mode. Additional electronics are powered off and the head is parked near the mid-diameter of the disk without servoing. Recovery time to Active mode is about 20 ms. 10.7.3 Low Power Idle Mode Power consumption is 60-65% less than that of Performance Idle mode. The heads are unloaded on the ramp but the spindle is still rotated at the full speed. Recovery time to Active mode is about 300 ms. 10.7.4 Transition time The transition time is dynamically managed by the user's recent access pattern, instead of fixed times. The ABLE-3 algorithm monitors the interval between commands instead of the command frequency of ABLE-2. The algorithm supposes that the next command will come with the same command interval distribution as the previous access pattern. The algorithm calculates the expected average saving energy and response delay for next command in several transition time case based on this assumption. And it selects the most effective transition time with the condition that the calculated response delay is shorter than the value calculated from the specified level by Set Feature Enable Advanced Power Management command. The optimal time to enter Active Idle mode is variable depending on the recent behavior of the user. It is not possible to achieve the same level of Power savings with a fixed entry time into Active Idle because every user's data and access pattern is different. The optimum entry time changes over time. The same algorithm works for entering into Low Power Idle mode and Standby mode, which consumes less power but needs more recovery time switching from this mode to Active mode. 10.8 S.M.A.R.T. Function The intent of Self-monitoring, analysis, and reporting technology (S.M.A.R.T.) is to protect user data and prevent unscheduled system downtime that may be caused by predictable degradation and/or fault of the device. By monitoring and storing critical performance and calibration parameters, S.M.A.R.T. devices employ sophisticated data analysis algorithms to predict the likelihood of near-term degradation or fault condition. By alerting the host system of a negative reliability status condition, the host system can warn the user of the impending risk of a data loss and advise the user of appropriate action. Since S.M.A.R.T. utilizes the internal device microprocessor and other device resources, there may be some small overhead associated with its operation. However, special care has been taken in the design of the S.M.A.R.T. algorithms to minimize the impact to host system performance. Actual impact of S.M.A.R.T. overhead is dependent on the specific device design and the usage patterns of the host system. To further ensure minimal impact to the user, S.M.A.R.T. capable devices are shipped from the device manufacturer's factory with the S.M.A.R.T. feature disabled. S.M.A.R.T. capable devices can be enabled by the system OEMs at time of system integration or in the field by after-market products. Travelstar 5K100 (Serial ATA) Hard Disk Drive Specification 57
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
 64
64 -
 65
65 -
 66
66 -
 67
67 -
 68
68 -
 69
69 -
 70
70 -
 71
71 -
 72
72 -
 73
73 -
 74
74 -
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
110
-
111
-
112
-
113
-
114
-
115
-
116
-
117
-
118
-
119
-
120
-
121
-
122
-
123
-
124
-
125
-
126
-
127
-
128
-
129
-
130
-
131
-
132
-
133
-
134
-
135
-
136
-
137
-
138
-
139
-
140
-
141
-
142
-
143
-
144
-
145
-
146
-
147
-
148
-
149
-
150
-
151
-
152
-
153
-
154
-
155
-
156
-
157
-
158
-
159
-
160
-
161
-
162
-
163
-
164
-
165
-
166
-
167
-
168
-
169
-
170
-
171
-
172
-
173
-
174
-
175
-
176
-
177
-
178
-
179
-
180
-
181
-
182
-
183
-
184
-
185
-
186
-
187
-
188
-
189
-
190
-
191
-
192
-
193
-
194
-
195
-
196
-
197
-
198
-
199
-
200
-
201
-
202
-
203
-
204
-
205
 |
 |
