Dell PowerVault 130T DLT Service Manual - Page 66
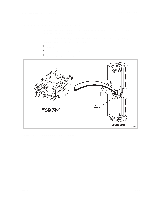
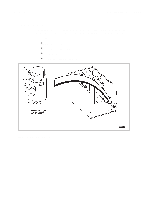
Connect the J3, J20, and J18 cables to the, bottom of the Z column.
 |
View all Dell PowerVault 130T DLT manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 66 highlights
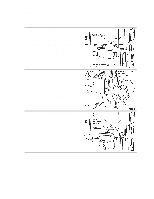
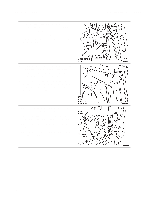
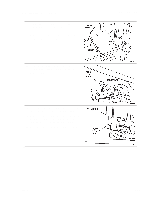
Hand/Camera Assembly 6. Slide the anti-rotation block up the Z column and register it to the locating pins on the hand assembly. 7. Install the screw securing the anti-rotation block (under the hand) using a Torx driver with a T-15 bit. 8. Install the two screws securing the flex cable clamp bracket to the bottom of the hand using a Torx driver with a T-10 bit. Make sure the flex cable is not twisted. 9. Carefully raise and lower the hand/camera assembly to be sure the hand flex cable has full range of movement to the top and bottom of the Z column. 10. Connect the J3, J20, and J18 cables to the connectors on the CYH card. 11. Secure the J20 connector under the cable clamp by flipping the clamp over the cable. 12. Rotate the robot so the hand is inside the library. 13. Carefully raise the hand to the top of the Z column assembly. PowerVault 130T Service Manual 3-30 4473D
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
 61
61 -
 62
62 -
 63
63 -
 64
64 -
 65
65 -
 66
66 -
 67
67 -
 68
68 -
 69
69 -
 70
70 -
 71
71 -
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
 |
 |
