Husqvarna AUTOMOWER SOLAR HYBRID Operation Manual - Page 12
Working method
 |
View all Husqvarna AUTOMOWER SOLAR HYBRID manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 12 highlights
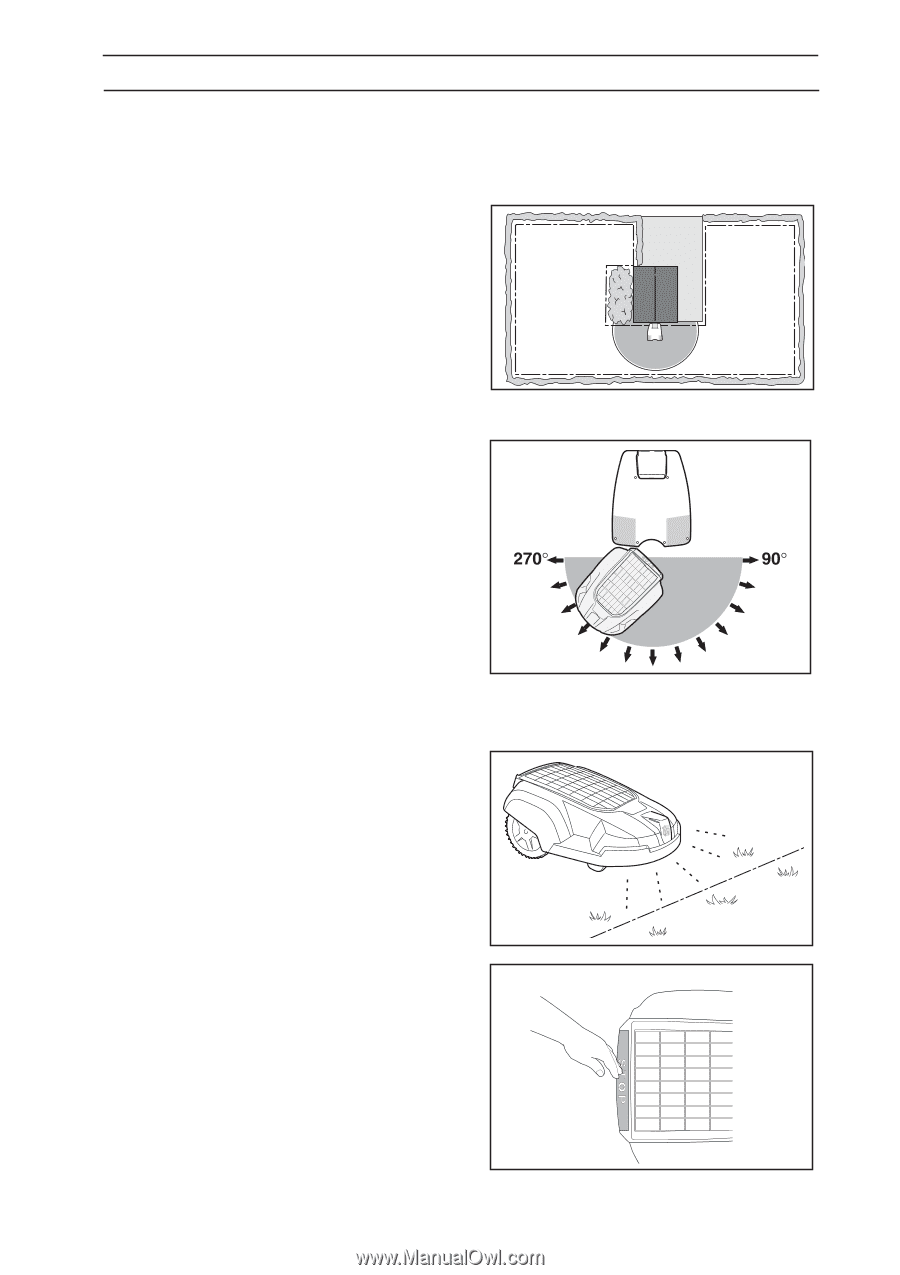
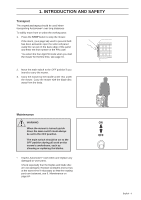
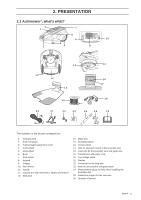
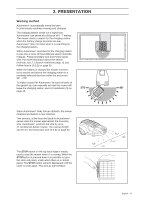
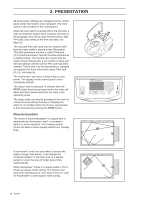
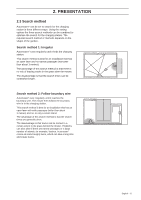
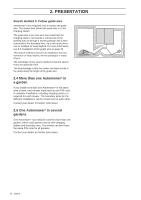
2. PRESENTATION Working method Automower® automatically mows the lawn. It continuously combines mowing and charging. The charging station sends out a signal that Automower® can sense at a distance of 6 - 7 metres. The mower starts to search for the charging station when the battery charge becomes too low. Automower® does not mow when it is searching for the charging station. When Automower® searches for the charging station it uses one or more of three different search methods: Irregular, Follow boundary wire and Follow guide wire. For more information about the search methods, see 2.3 Search method on page 15 and Follow loop in (3-2-2) on page 50. When the battery is charged the mower reverses, turns around and leaves the charging station in a randomly selected direction within the exit sector 90° - 270°. To make it easier for Automower® to reach all parts of the garden you can manually set how the mower will leave the charging station, see 6.5 Installation (3) on page 48. When Automower® body hits an obstacle, the mower reverses and selects a new direction. Two sensors, at the front and back on Automower®, sense when the mower approaches the boundary wire. Automower® overruns the wire by up to 27 centimetres before it turns. The overrun length can be set, see Drive past wire (3-4-2) on page 54. The STOP button on the top back edge is mainly used to stop the mower when it' s running. When the STOPbutton is pressed down it is possible to open the solar cell panel, under which there is a control panel. The STOP button remains depressed until the cover is reset again. This acts as start inhibitor. English - 13
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
 7
7 -
 8
8 -
 9
9 -
 10
10 -
 11
11 -
 12
12 -
 13
13 -
 14
14 -
 15
15 -
 16
16 -
 17
17 -
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
 |
 |