HP Indigo WS6000 Indigo Technical Tips and Workarounds - Page 13
Writing Head Motorized Interface homing, System:
 |
View all HP Indigo WS6000 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 13 highlights
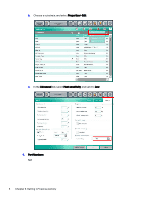
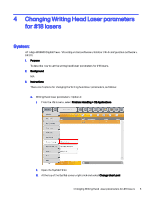
5 Writing Head Motorized Interface homing System: HP Indigo WS6600 Digital Press 1. Purpose To describe how to adjust the Writing Head (WH) Motorized Interface (MI) homing. 2. Background N/A 3. Instructions a. Set the press to Standby. b. In the SysTab editor, got to whMotorCalibCtrl. c. Copy the values found in the Dynamic field of the stepsToCorrect[] parameters into the whMotorMoveSteps[] parameters, and change them to negative values: i. Copy stepsToCorrect[0] into whMotorMoveSteps[0] - but change the value to minus so that the WH MI moves down the same number of increments. ii. Copy stepsToCorrect[1] into whMotorMoveSteps[1] - but change the value to minus so that the WH MI moves down the same number of increments. iii. stepsToCorrect[2] into whMotorMoveSteps[2] - but change the value to minus so that the WH MI moves down the same number of increments. Writing Head Motorized Interface homing 9
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
 8
8 -
 9
9 -
 10
10 -
 11
11 -
 12
12 -
 13
13 -
 14
14 -
 15
15 -
 16
16 -
 17
17 -
 18
18 -
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
 |
 |
