Lowrance HDS-7 Carbon Operators Manual EN - Page 115
Spiral turn, Zigzag turns, Square turn, Lazy S-turn, Depth contour tracking, DCTTM, Warning
 |
View all Lowrance HDS-7 Carbon manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 115 highlights
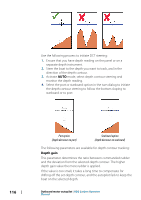
You can adjust the Rate of turn from the turn dialog before the turn is initiated and during the turn. Increasing the turn rate makes the vessel turn a smaller circle. Spiral turn Spiral-turn makes the vessel turn in a spiral with a decreasing or increasing radius. You set the initial radius before the turn is initiated, and the change per turn during the turn. If the change per turn is set to zero, the vessel turns in a circle. Negative values indicate decreasing radius while positive values indicate increasing radius. Zigzag turns Steers the vessel in a zigzag pattern. For navigating in a zigzag pattern, you set the initial heading change before the turn is started. During the turn you can alter the main heading, the heading change, and the leg distance. Square turn Makes the vessel automatically turn 90° after having travelled a defined leg distance. At any time during the turn you can change the main heading and the distance of the leg until the vessel makes a new 90° turn. Lazy S-turn Makes the vessel yaw around the main heading. You set the selected heading change before the turn is started. During the turn you can alter the main heading, the heading change and the turn radius from within the turn dialog. Depth contour tracking, DCTTM If the system has Sonar input, the autopilot can be set to follow a depth contour. Warning: Do not use this feature unless the seabed is suitable. Do not use it in rocky waters where the depth is varying significantly over a small area. Outboard motor autopilot | HDS Carbon Operator Manual 115
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
 110
110 -
 111
111 -
 112
112 -
 113
113 -
 114
114 -
 115
115 -
 116
116 -
 117
117 -
 118
118 -
 119
119 -
 120
120 -
121
-
122
-
123
-
124
-
125
-
126
-
127
-
128
-
129
-
130
-
131
-
132
-
133
-
134
-
135
-
136
-
137
-
138
-
139
-
140
-
141
-
142
-
143
-
144
-
145
-
146
-
147
-
148
-
149
-
150
-
151
-
152
-
153
-
154
-
155
-
156
-
157
-
158
-
159
-
160
-
161
-
162
-
163
-
164
-
165
-
166
-
167
-
168
-
169
-
170
-
171
-
172
-
173
-
174
-
175
-
176
-
177
-
178
-
179
-
180
-
181
-
182
-
183
-
184
-
185
-
186
-
187
-
188
-
189
-
190
-
191
-
192
-
193
-
194
-
195
-
196
-
197
-
198
 |
 |
