iRobot Roomba 570 Service Manual - Page 16
Normal Cleaning Behavior - brushes don t turn
 |
View all iRobot Roomba 570 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 16 highlights
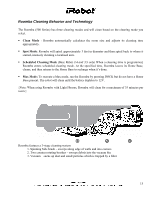
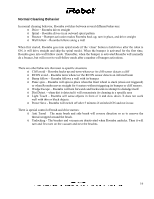
Normal Cleaning Behavior In normal cleaning behavior, Roomba switches between several different behaviors: o Drive - Roomba drives straight o Spiral - Roomba drives in an outward spiral pattern o Bounce - Bumper activation makes Roomba back up, turn in place, and drive straight o Wall follow - Roomba follows along a wall When first started, Roomba goes into spiral mode (if the 'clean' button is held twice after the robot is ON, it will drive straight and skip the spiral mode). When the bumper is activated for the first time, Roomba goes into wall follow mode. Thereafter, when the bumper is activated Roomba will normally do a bounce, but will revert to wall-follow mode after a number of bumper activations. There are other behaviors that react to specific situations o Cliff avoid - Roomba backs up and turns whenever its cliff sensor detects a cliff o RCON avoid - Roomba turns whenever the RCON sensor detects an infrared beam o Bump follow - Roomba follows a wall with its bumper o Panic spin - Roomba will spin in place when the front wheel is stuck (stasis not triggered) or when Roomba moves straight for 6 meters without triggering its bumper or cliff sensors. o Wedge Escape - Roomba will turn forwards and backwards in attempt to dislodge itself. o Dirt Detect - when dirt is detected it will concentrate its cleaning in a specific area o Light Touch - Roomba will sense objects in front of it and slow down. It does not work well with thin or black objects. o Power Save - Roomba will switch off after 5 minutes if switched ON and not in use. There is special control of brush and drive motors: o Anti Tassel - The main brush and side brush will reverse direction so as to remove the thread wrapped around the brush. o Undocking - The brushes and vacuum are deactivated when Roomba undocks. Then it will turn and first turn on the vacuum and next the brushes. 16
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
 11
11 -
 12
12 -
 13
13 -
 14
14 -
 15
15 -
 16
16 -
 17
17 -
 18
18 -
 19
19 -
 20
20 -
 21
21 -
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
 |
 |
