Fujitsu MPD3173AT Product Manual - Page 50
Circuit Configuration
 |
View all Fujitsu MPD3173AT manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 50 highlights
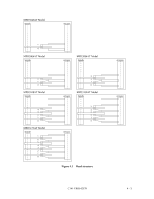
4.3 Circuit Configuration Figure 4.2 shows the disk drive circuit configuration. (1) Read/write circuit The read/write circuit consists of two LSIs; read/write preamplifier (PreAMP) and read channel (RDC). The PreAMP consists of the write current switch circuit, that flows the write current to the head coil, and the voltage amplifier circuit, that amplitudes the read output from the head. The RDC is the read demodulation circuit using the Extended Partial Response Class 4 (EPR4), and contains the Viterbi detector, programmable filter, adaptable transversal filter, times base generator, and data separator circuits. The RDC also contains the 16/17 group coded recording (GCR) encoder and decoder and servo demodulation circuit. (2) Servo circuit The position and speed of the voice coil motor are controlled by 2 closed-loop servo using the servo information recorded on the data surface. The servo information is an analog signal converted to digital for processing by a MPU and then reconverted to an analog signal for control of the voice coil motor. (3) Spindle motor driver circuit The circuit measures the interval of a PHASE signal generated by counter-electromotive voltage of a motor, or servo mark at the MPU and controls the motor speed comparing target speed. (4) Controller circuit Major functions are listed below. • Data buffer management • ATA interface control and data transfer control • Sector format control • Defect management • ECC control • Error recovery and self-diagnosis C141-E069-02EN 4 - 5
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
 45
45 -
 46
46 -
 47
47 -
 48
48 -
 49
49 -
 50
50 -
 51
51 -
 52
52 -
 53
53 -
 54
54 -
 55
55 -
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
110
-
111
-
112
-
113
-
114
-
115
-
116
-
117
-
118
-
119
-
120
-
121
-
122
-
123
-
124
-
125
-
126
-
127
-
128
-
129
-
130
-
131
-
132
-
133
-
134
-
135
-
136
-
137
-
138
-
139
-
140
-
141
-
142
-
143
-
144
-
145
-
146
-
147
-
148
-
149
-
150
-
151
-
152
-
153
-
154
-
155
-
156
-
157
-
158
-
159
-
160
-
161
-
162
-
163
-
164
-
165
-
166
-
167
-
168
-
169
-
170
-
171
-
172
-
173
-
174
-
175
-
176
-
177
-
178
-
179
-
180
-
181
-
182
-
183
-
184
-
185
-
186
-
187
-
188
-
189
-
190
-
191
 |
 |
