TASCAM DA-6400 TELNET protocol specifications - Page 7
Repeat Mode Select Select
 |
View all TASCAM DA-6400 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 7 highlights
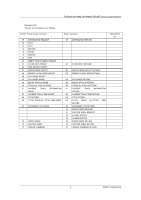
TASCAM DA-6400/DA-6400dp TELNET protocol specifications Command sequence Most of the time, the controlled device does not send ACK in response to transport control and data preset commands sent by the controlling device. The controlled device sends return commands in response to data sense commands that request the return of data values set in the controlled device. The controlled device also sends notification commands to the controlling device when its status changes, for example from stopped to playing, and when errors and other significant things occur. Examples of command sequences follow. Always leave at least 20 ms open between commands. Example 1: Control the transport of the controlled device This is an example of starting playback. When the controlled device receives a PLAY command and starts playing, it sends a CHANGED STATUS command. ACK is not sent for the PLAY command. Controlling device Command Controlled device Controlled device status Stopped PLAY -> REPEAT mode set to ON Example 3: Receiving set data This is an example of receiving the set REPEAT mode. When the controlled device receives a REPEAT MODE SELECT (Sense) command, it returns the set REPEAT mode. Controlling device Command Controlled device Controlled device status REPEAT MODE SELECT (Sense) -> CHANGED STATUS CHANGES STATUS
-
 1
1 -
 2
2 -
 3
3 -
 4
4 -
 5
5 -
 6
6 -
 7
7 -
 8
8 -
 9
9 -
 10
10 -
 11
11 -
 12
12 -
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
 |
 |
