Lexmark E238 Service Manual - Page 106
Laser servo never started due to potential, conflict with the transfer servo.
 |
View all Lexmark E238 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 106 highlights
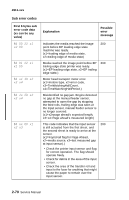
4511-xxx Sub error codes (continued) First 6 bytes sub error code data (xx can be any value) 84 xx 2C x1 x2 x3 84 xx 2D x1 x2 x3 84 xx 2E x1 x2 00 84 xx 2F x1 x2 x3 Explanation Possible error message Unrecoverable no gap jam. Engine detected no gap at the manual feeder sensor, attempted to open the gap by stopping the feed rolls, but no trailing edge was ever seen at the input sensor. (x1=media size, x2=media source, x3=LastdetectedSize) Misidentified no gap jam. Engine detected no gap at the manual feeder sensor, attempted to open the gap by stopping the feed rolls, trailing edge was seen at the input sensor, manual feeder sensor is no longer covered. (x1=media size, x2=source, x3=LastDectedSize) Failed no gap jam recovery. Engine detected no gap at the manual feeder sensor, opened the gap by stopping the feed rolls, but never saw the leading edge of the second page at the input sensor. (x1=RecoveryStatus, x2-source) Laser servo never started due to potential 200 conflict with the transfer servo. (x1=bit 0: transfer servo started, bit 1: transport started; x2+x3=transfer servo count value.) Possible causes are: • Slow or missing transport motor positional feedback. • Media arrives too early at the input sensor. 2-74 Service Manual
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
 101
101 -
 102
102 -
 103
103 -
 104
104 -
 105
105 -
 106
106 -
 107
107 -
 108
108 -
 109
109 -
 110
110 -
 111
111 -
112
-
113
-
114
-
115
-
116
-
117
-
118
-
119
-
120
-
121
-
122
-
123
-
124
-
125
-
126
-
127
-
128
-
129
-
130
-
131
-
132
-
133
-
134
-
135
-
136
-
137
-
138
-
139
-
140
-
141
-
142
-
143
-
144
-
145
-
146
-
147
-
148
-
149
-
150
-
151
-
152
-
153
-
154
-
155
-
156
-
157
-
158
-
159
-
160
-
161
-
162
-
163
-
164
-
165
-
166
-
167
-
168
-
169
-
170
-
171
-
172
-
173
-
174
-
175
-
176
-
177
-
178
-
179
-
180
-
181
-
182
-
183
-
184
-
185
-
186
-
187
-
188
-
189
-
190
-
191
-
192
-
193
-
194
-
195
-
196
-
197
-
198
-
199
-
200
-
201
-
202
-
203
-
204
-
205
-
206
-
207
-
208
-
209
-
210
-
211
-
212
-
213
-
214
-
215
-
216
-
217
-
218
-
219
-
220
-
221
-
222
-
223
-
224
-
225
-
226
-
227
-
228
-
229
-
230
-
231
-
232
-
233
-
234
-
235
-
236
-
237
-
238
-
239
-
240
-
241
-
242
-
243
-
244
-
245
-
246
-
247
-
248
-
249
-
250
-
251
-
252
-
253
-
254
-
255
-
256
-
257
-
258
-
259
 |
 |
