Pioneer AVIC-D3 Owner's Manual - Page 138
Positioning by dead reckoning, How do GPS and dead reckon, ing work together? - speed sensor
 |
UPC - 012562844169
View all Pioneer AVIC-D3 manuals
Add to My Manuals
Save this manual to your list of manuals |
Page 138 highlights
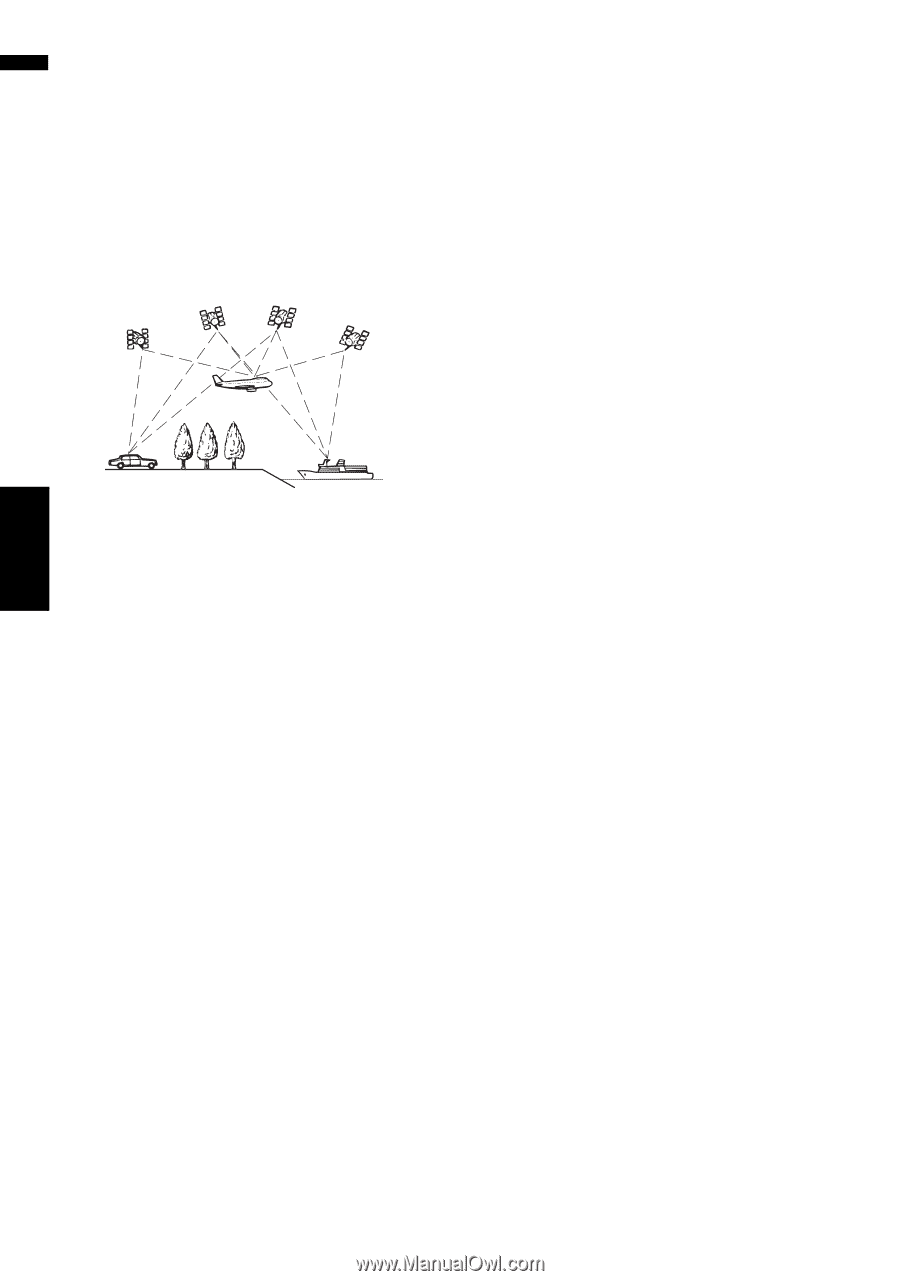
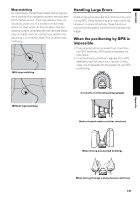
Appendix NAVI/AV picked up from any open area on the ground's surface. The accuracy of the GPS information depends on how good the reception is. When the signals are strong and reception is good, GPS can determine latitude, longitude and altitude for accurate positioning in three dimensions. But if signal quality is poor, only two dimensions, latitude and longitude, can be obtained and positioning errors are somewhat greater. Positioning by dead reckoning The 3D Hybrid Sensor in the navigation system also calculates your position. The current location is measured by detecting driving distance with the speed pulse, the turning direction with the Gyrosensor and inclination of the road with the G sensor. The 3D Hybrid Sensor can even calculate changes of altitude, and corrects for discrepancies in the distance traveled caused by driving along winding roads or up slopes. Also, the navigation system learns the driving conditions and stores information in the memory. Thus, as you drive more, the precision of the positioning becomes more accurate. The method of positioning changes as follows depending on whether the speed pulse of your vehicle is detected or not: 3D hybrid mode This is active when the speed pulse is detected. Inclination of a street can be detected. Simple hybrid mode When the speed pulse is not detected, positioning is performed in this mode. Only horizontal movement is detected, so it becomes less accurate. Also, when the positioning by GPS is not 136 available, such as when your vehicle enters a long tunnel, the discrepancy between your actual and calculated position may become bigger. ❒ The speed pulse data comes from the speed sensing circuit. The location of this speed sensing circuit depends on your vehicle model. In some cases, it is impossible to make a connection to it, and in such a case we recommend that the ND-PG1 speed pulse generator (sold separately) be used. How do GPS and dead reckoning work together? For maximum accuracy, your navigation system continually compares GPS data with your estimated position as calculated from the data of 3D Hybrid Sensor. However, if only the data from the 3D Hybrid Sensor is available for a long period, positioning errors are gradually compounded until the estimated position becomes unreliable. For this reason, whenever GPS signals are available, they are matched with the data of the 3D Hybrid Sensor and used to correct it for improved accuracy. To ensure maximum accuracy, the dead reckoning system learns with experience. By comparing the position it estimates with your actual position as obtained using GPS, it can correct for various types of error, such as tire wear and the rolling motion of your vehicle. As you drive, the dead reckoning system gradually gathers more data, learns more, and the accuracy of its estimates gradually increases. So, after you have driven some distance, you can expect your position as shown on the map to show fewer errors. ❒ If you use chains on your wheels for winter driving or put on the spare wheel, errors may suddenly increase because of difference in wheel diameter. The system detects the fact that the tire diameter has changed, and automatically replaces the value for calculating distance. ❒ If the ND-PG1 is used or if your vehicle is operating in Simple hybrid mode, the distance calculation value cannot be replaced automatically.
-
 1
1 -
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
110
-
111
-
112
-
113
-
114
-
115
-
116
-
117
-
118
-
119
-
120
-
121
-
122
-
123
-
124
-
125
-
126
-
127
-
128
-
129
-
130
-
131
-
132
-
 133
133 -
 134
134 -
 135
135 -
 136
136 -
 137
137 -
 138
138 -
 139
139 -
 140
140 -
 141
141 -
 142
142 -
 143
143 -
144
-
145
-
146
-
147
-
148
-
149
-
150
-
151
-
152
-
153
-
154
-
155
-
156
-
157
-
158
-
159
-
160
-
161
-
162
-
163
-
164
-
165
-
166
-
167
-
168
-
169
-
170
-
171
-
172
-
173
 |
 |